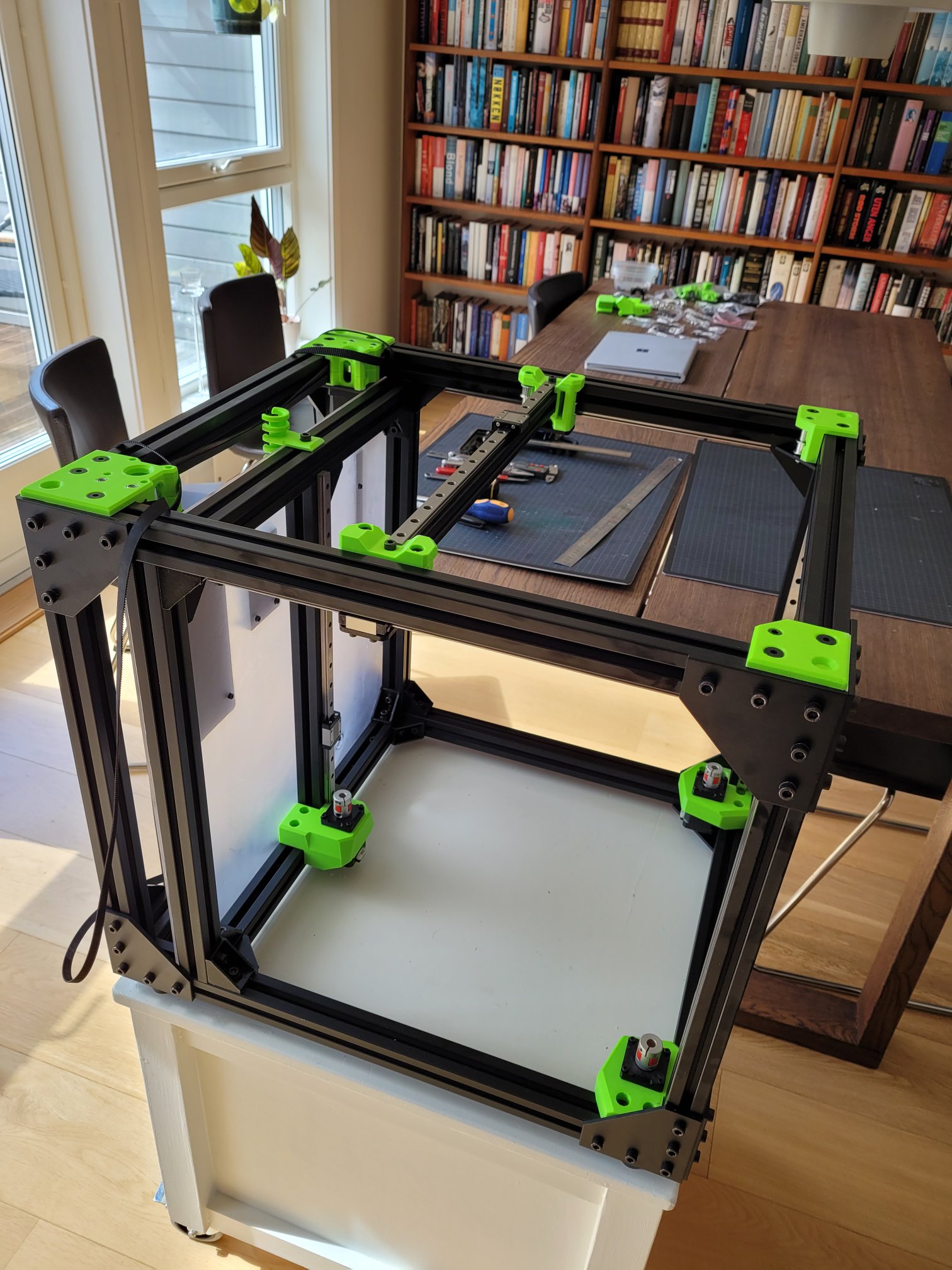
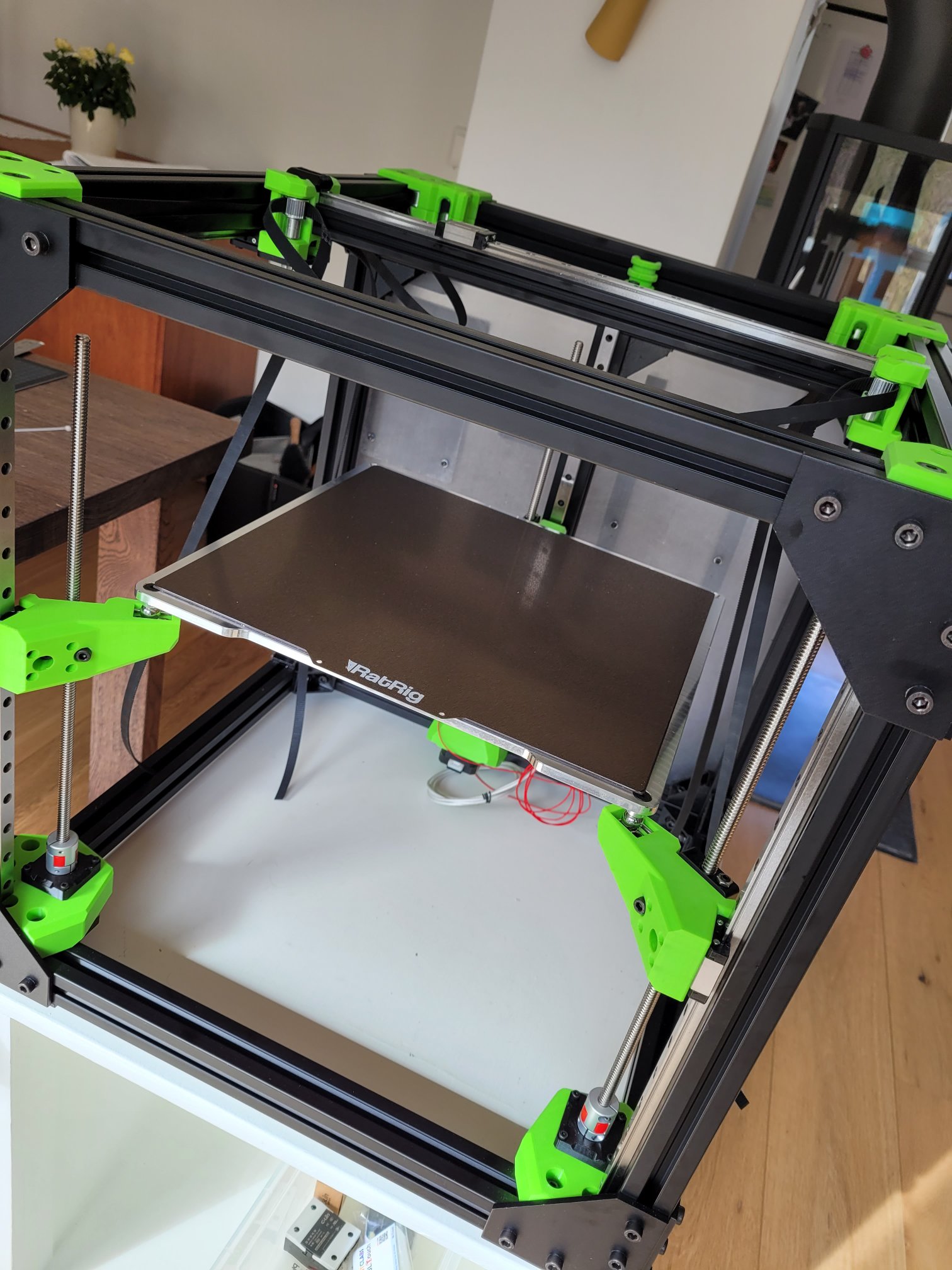
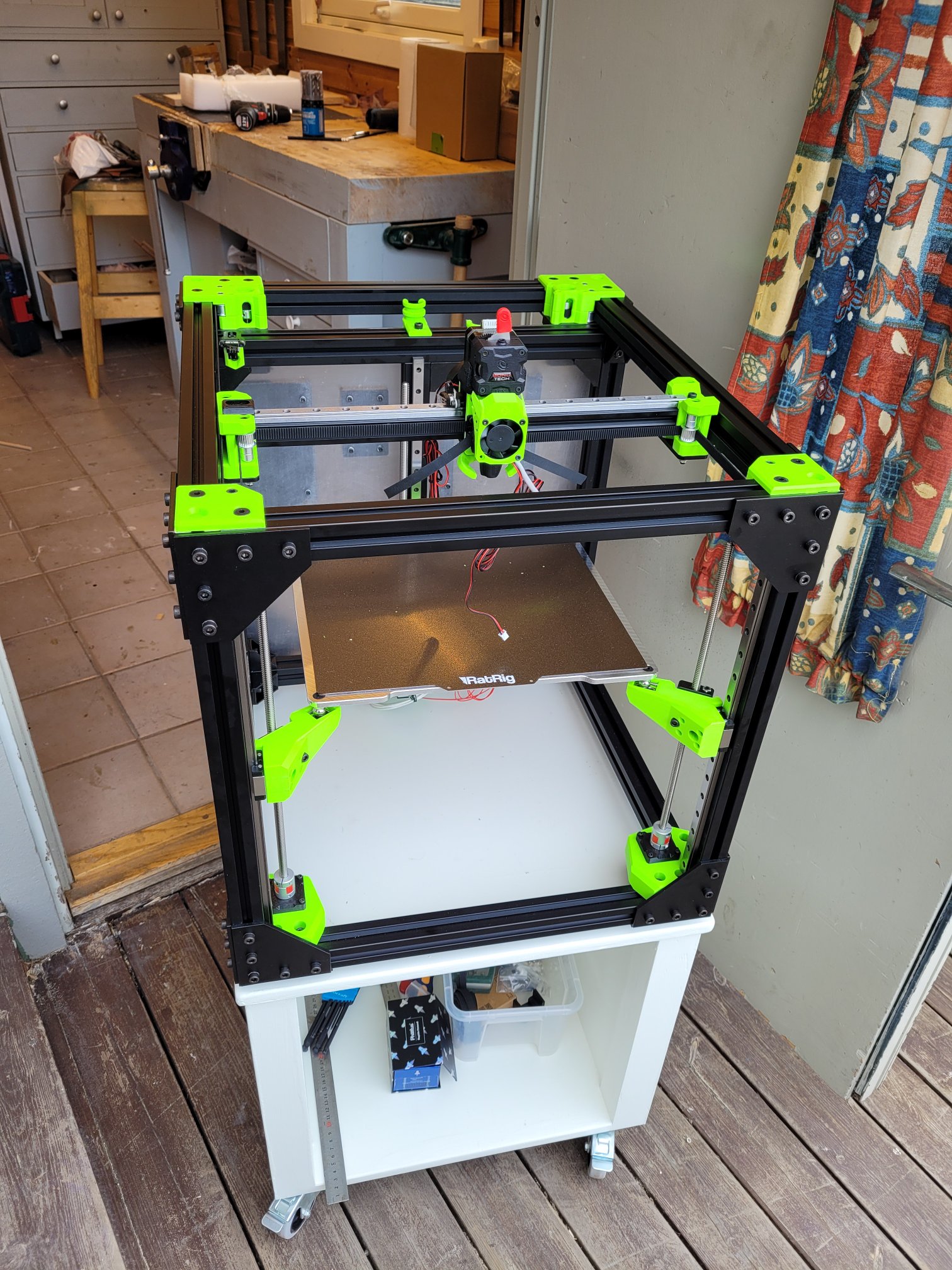
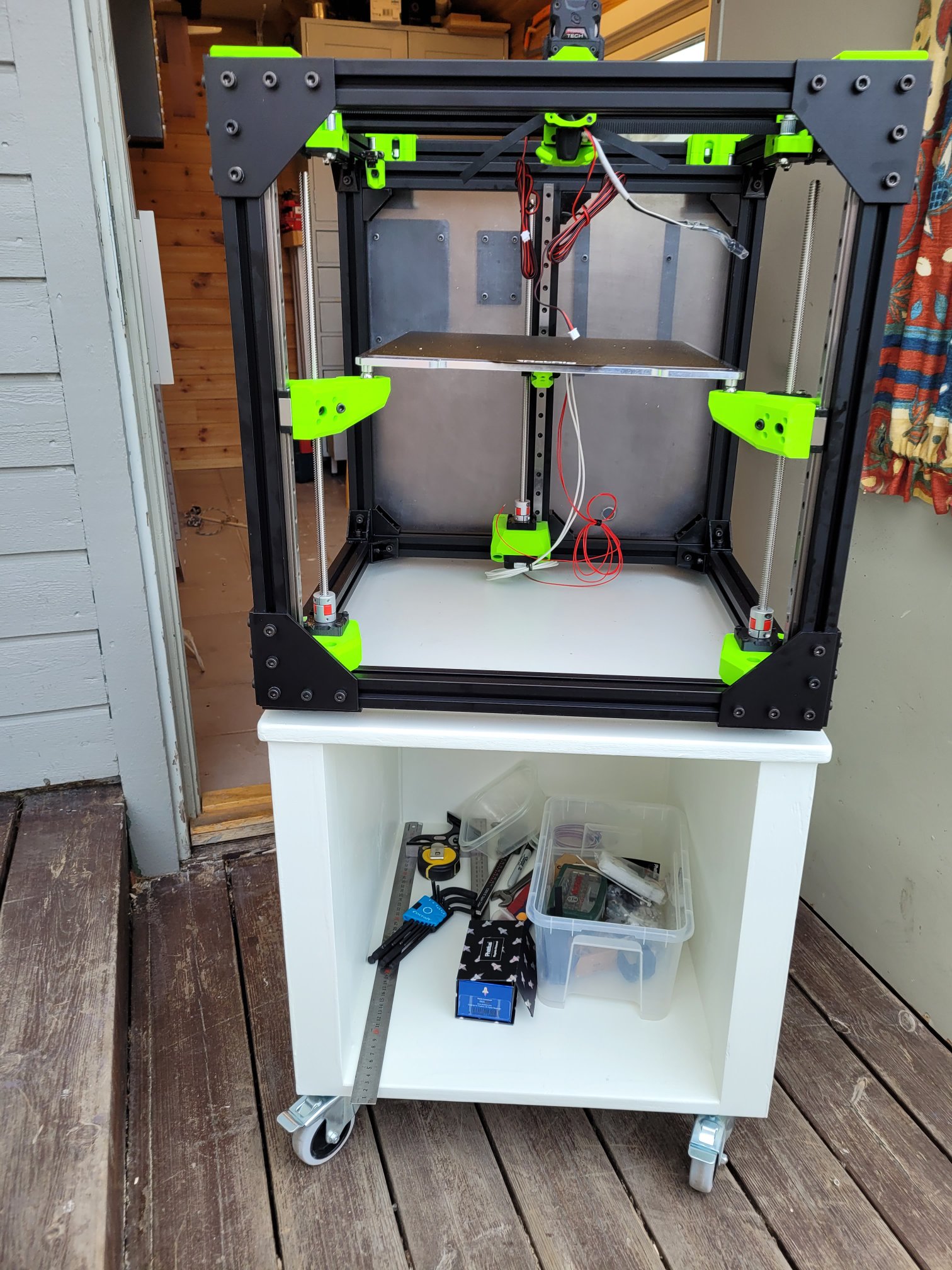
I hvertfall første utgave. Det er mer som skal legges til etter hvert, slik som lys, røykvarsler og kanskje et kamera, men enn så lenge er den klar til å brukes. Tror jeg da. Alle motorer snurrer som de skal, viftene går som forventet, både hot-end og byggeplate har varme, og alt ser bra ut.
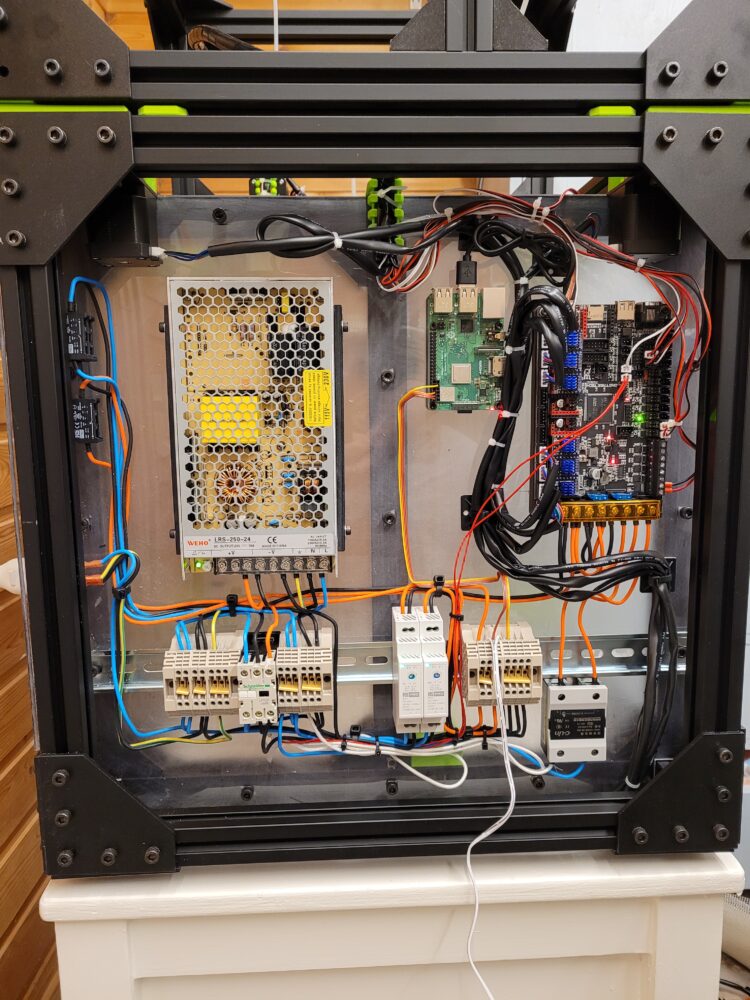
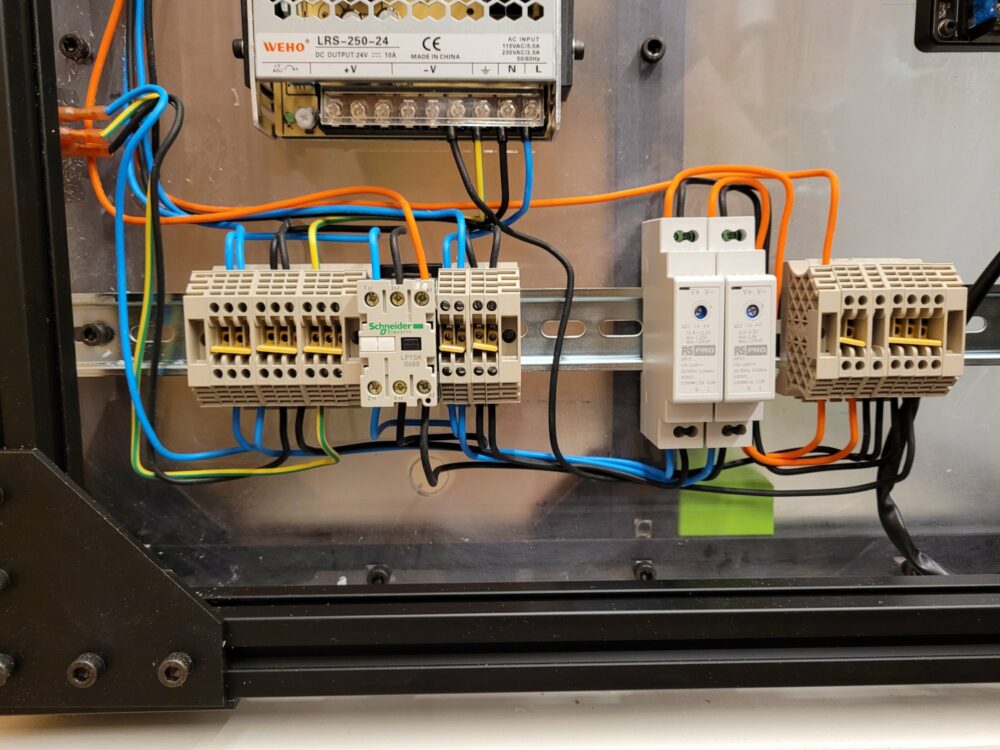
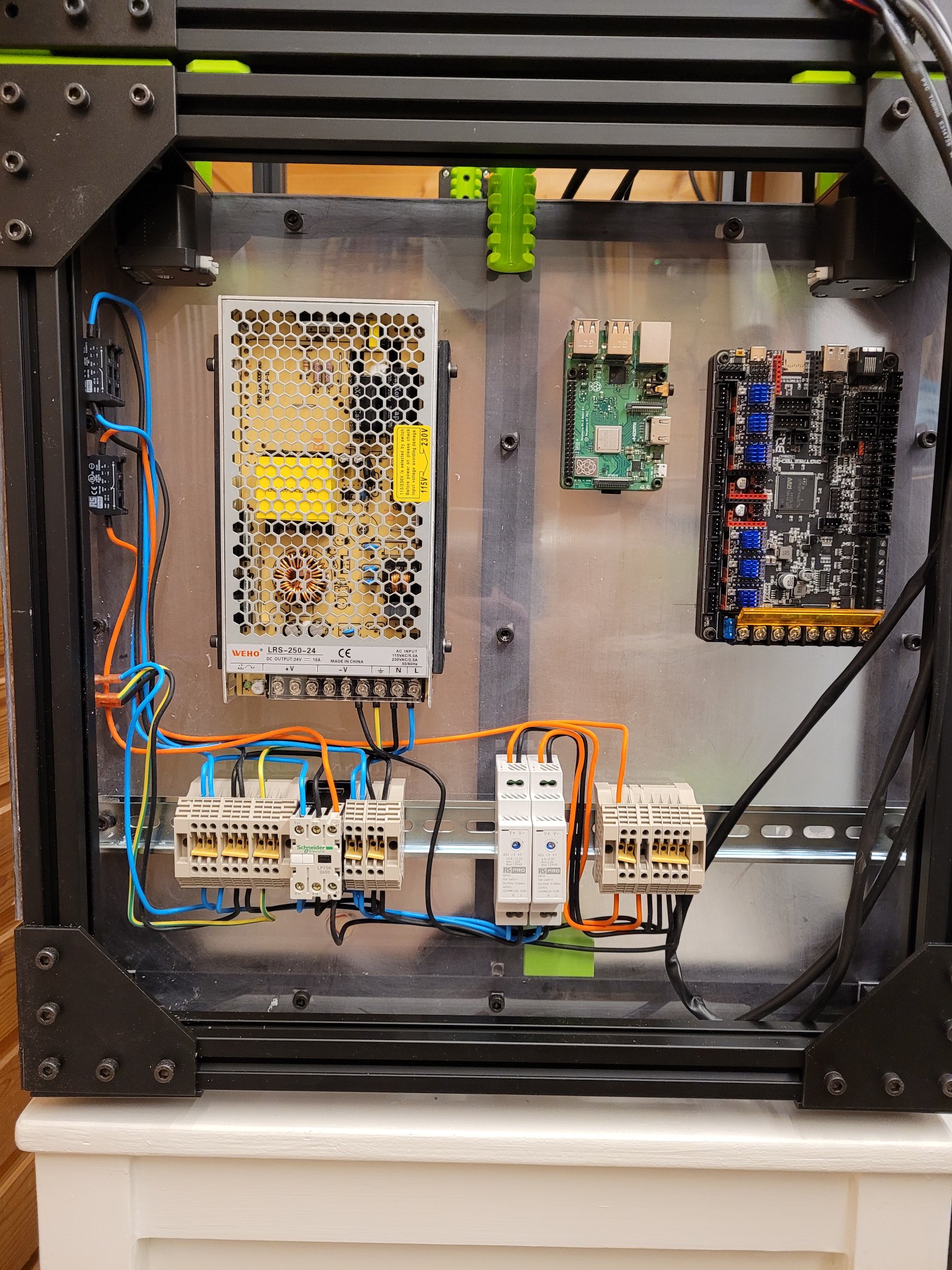
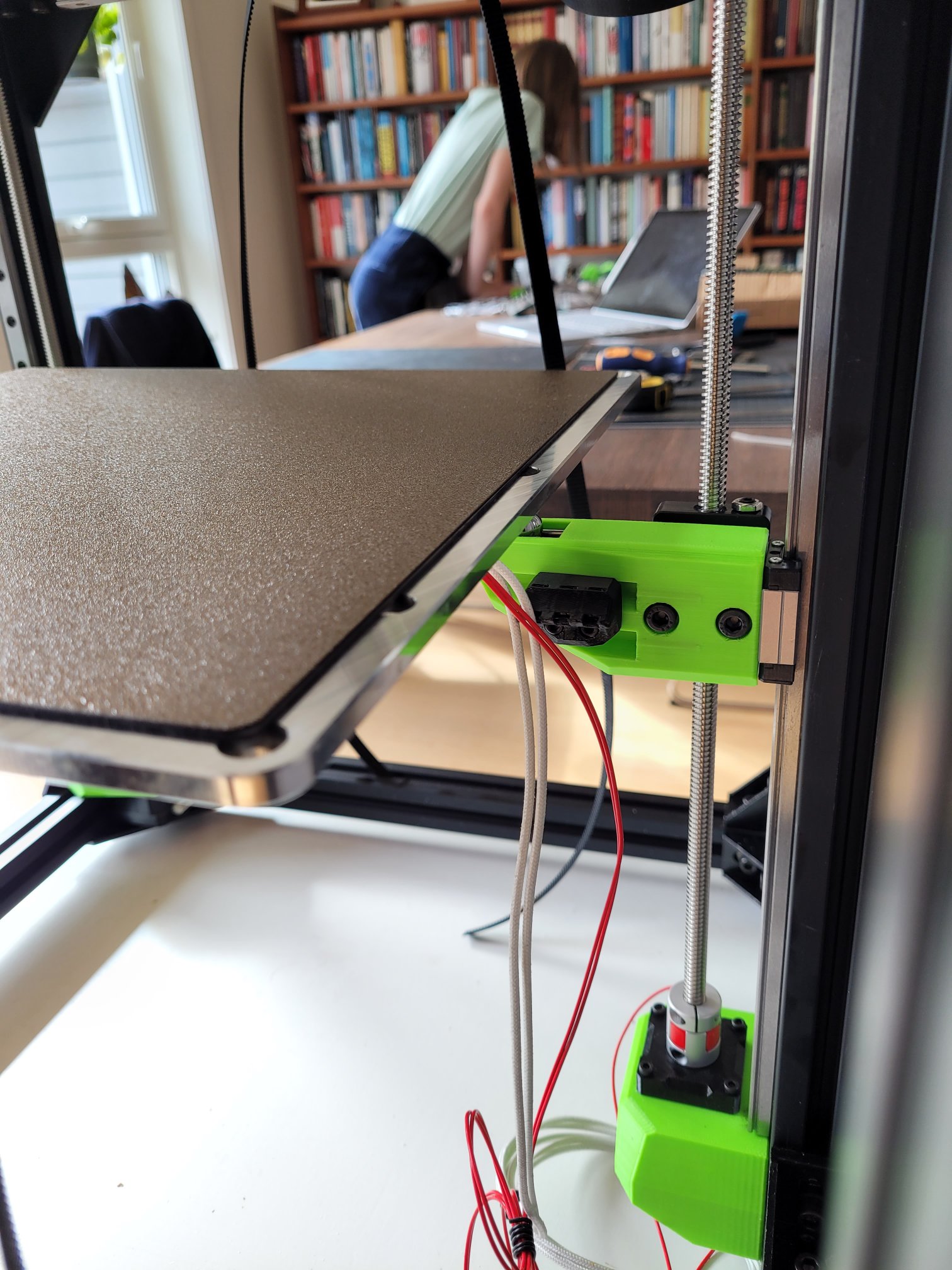
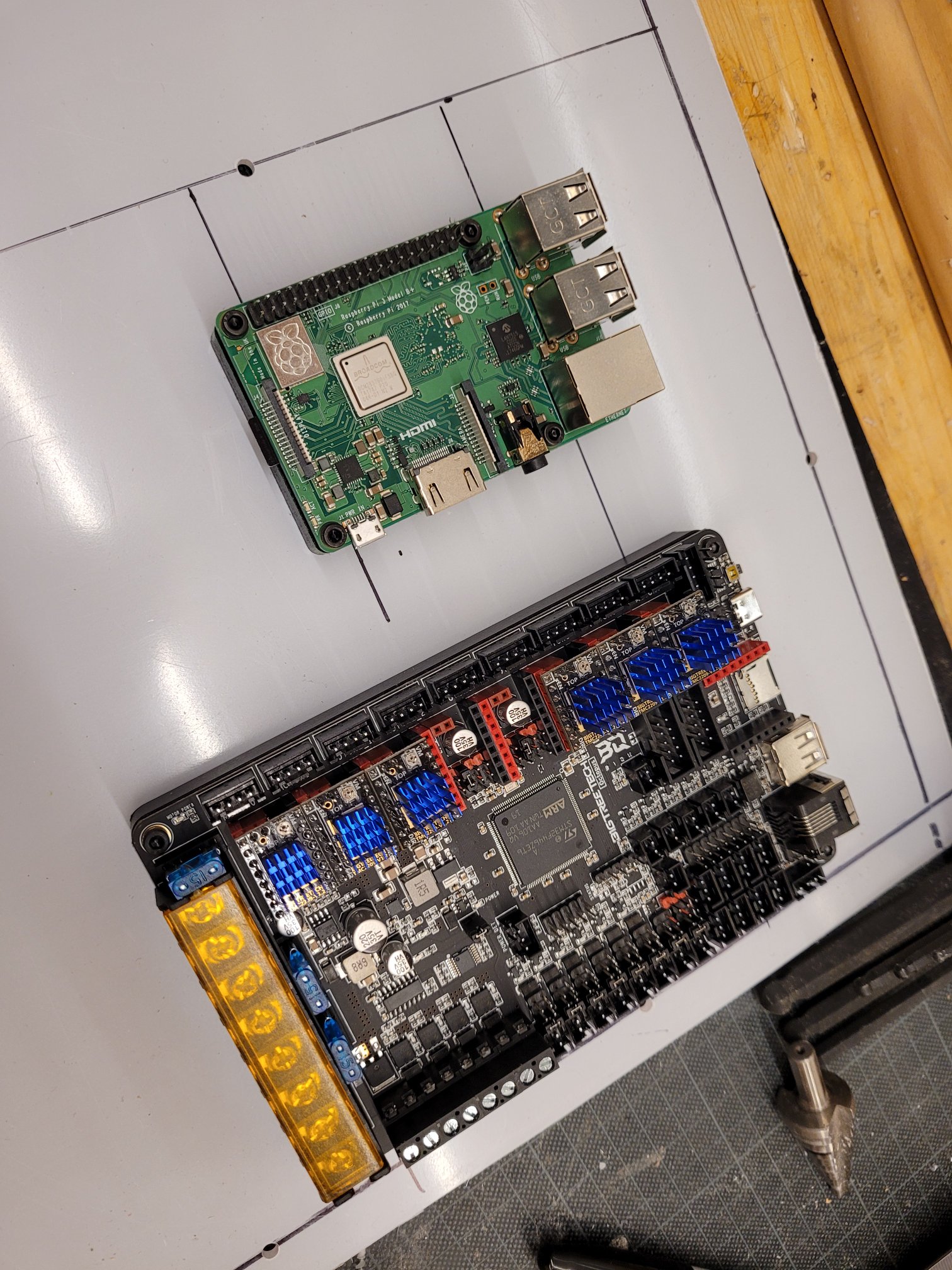
Sånn ser det ut bak der nå. Det er stort sett ganske ryddig, spesielt alt av 230V. Det er en rød ledning som henger litt på skrå over, og det skal den få lov til. Det er termistoren til byggeplata, og ledningen var litt for kort. Orker ikke å skjøte den 5cm. I tillegg henger det en løs hvit ledning ned som etter hvert skal bli til belysning inne i kammeret.
Jeg gjorde én premietabbe helt til slutt i dag. Nede til høyre ser du et solid state relé. Jeg klarte å sette dette opp ned. Ikke noen krise i seg selv, men det medførte også at jeg koblet feil. det vil da si at jeg koblet 24V styresignal inn på 230V terminalene, og 230V inn på styre-terminalene. Det reléet slapp ut den magiske røyken, og er ikke mer. Heldigvis hadde jeg ved en feiltakelse bestilt en ekstra. Dette var selvfølgelig det aller siste jeg gjorde. Alt hadde gått helt smertefritt fram til da, så jeg var nesten litt bekymret for at jeg ikke skulle gjøre noen bommerter.
Neste trinn blir å printe noe. Eller kanskje jeg må kalibrer noen PID-kontrollere aller først.